Robotic Hand
Demo
Overview
A wired remote-controlled robotic hand. The remote uses flex sensors on a glove to measure the angle of each finger, and the robotic hand receives this data to set servo angles for each corresponding finger. Originally intended to be wireless via Bluetooth, technical difficulties required a UART wired implementation.
Hardware
The microcontroller is an STM32L031K6Tx running at 2.097 MHz, powered at 3.3V using a DC regulator with decoupling capacitors. Finger sensors are amplified via LM358 op-amps and read by ADC channels. Servos are controlled with a PCA9685 I²C PWM driver. UART provides communication between the remote and hand.
The original design included a NORA-W36 Bluetooth module to enable wireless communication. While the hardware was integrated into the PCB, communication issues during testing prevented reliable operation, so the final system uses a wired UART link instead.
- Microcontroller: STM32L031K6Tx
- Power: 3.3V via regulator TC1262-330
- Finger Sensors: 5× Flex Sensors FS2-L-055-253-ST with LM358 amplification
- Servo Controller: PCA9685 PWM driver
- Communication: UART between remote and hand
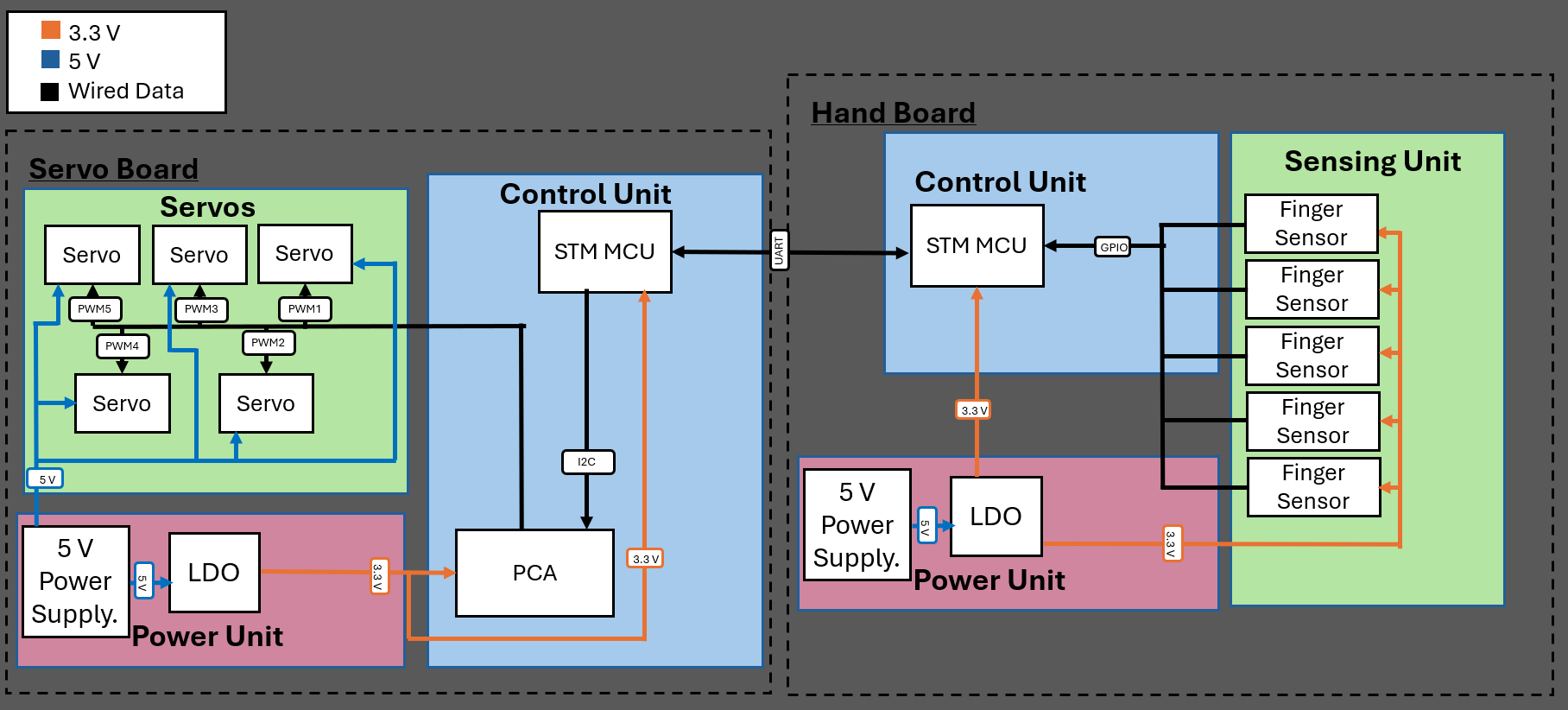
Block Diagram
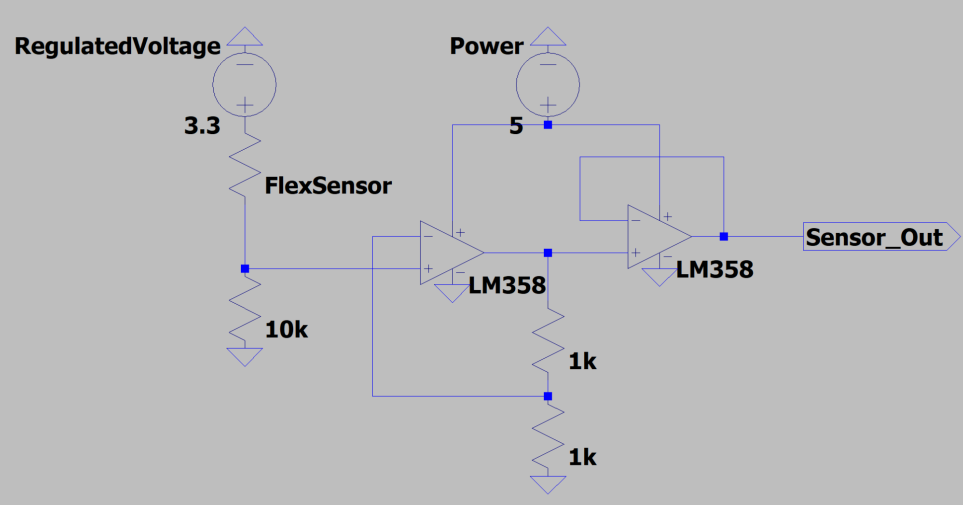
Sensing Circuit with Voltage Follower and Gain
PCB Design
Two custom PCBs were designed in KiCad: a remote controller board that reads flex sensor signals and a servo controller board that drives the robotic hand. Both boards integrate the microcontroller, power regulation, and communication interfaces required for the system.
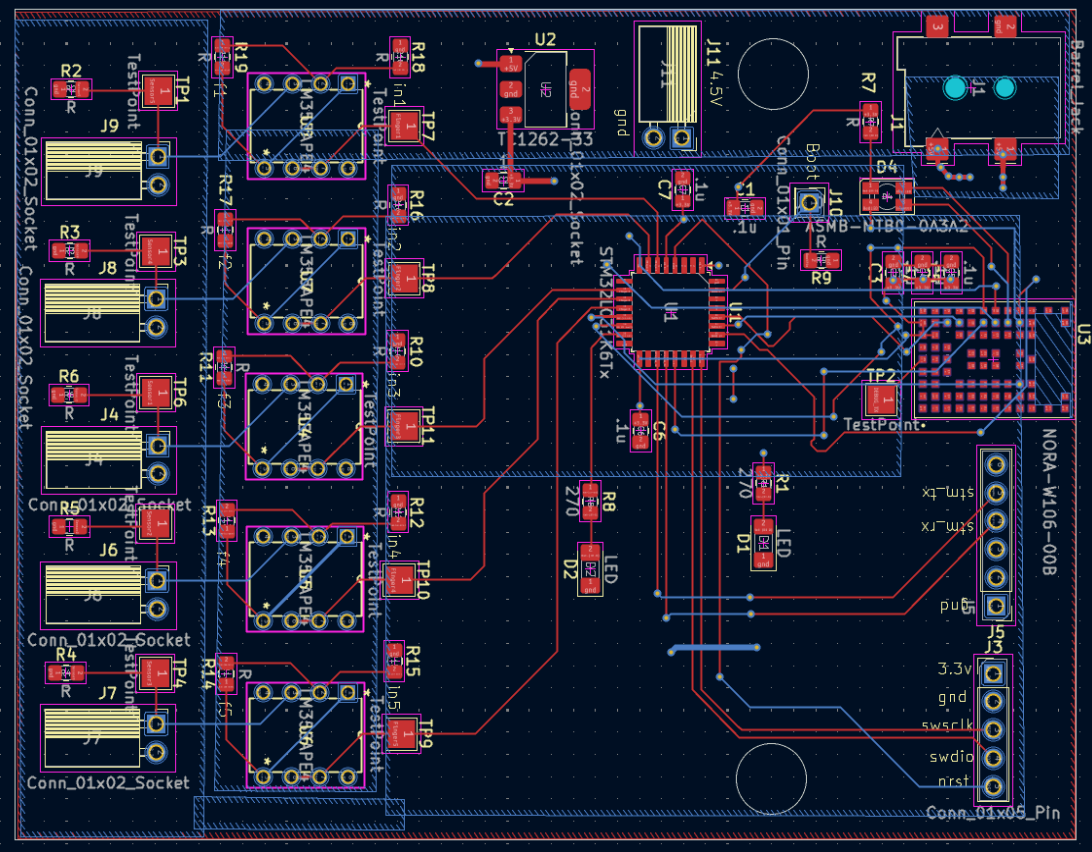
Flex Sensor Controller PCB Layout
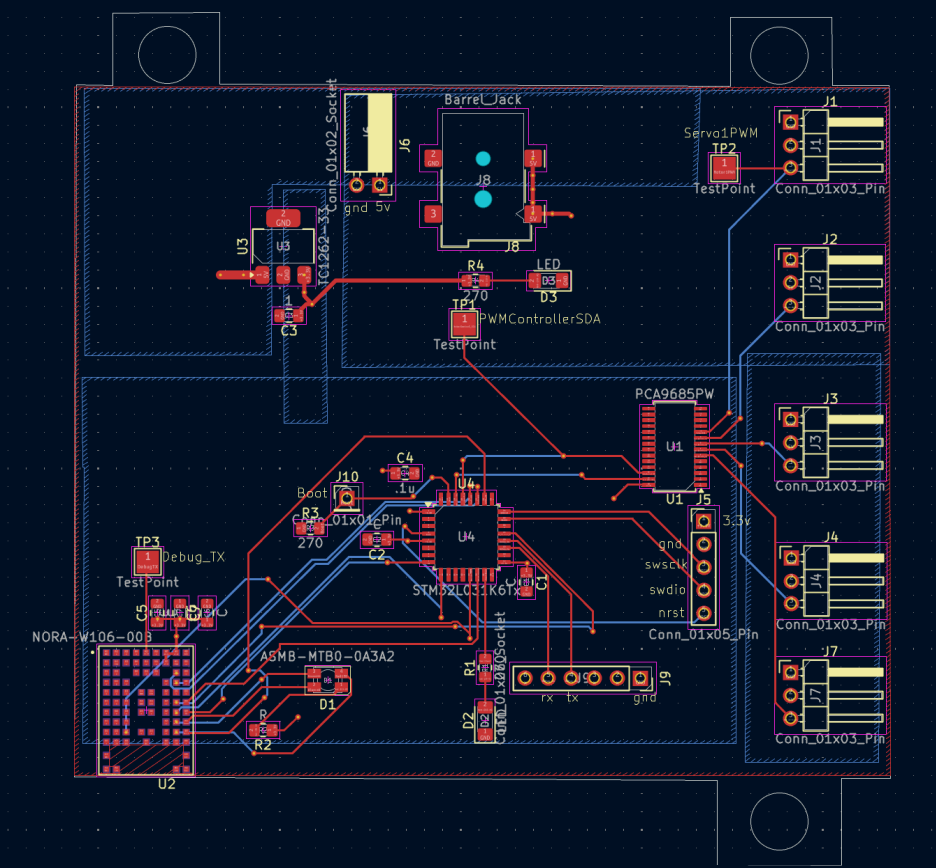
Servo Controller PCB Layout
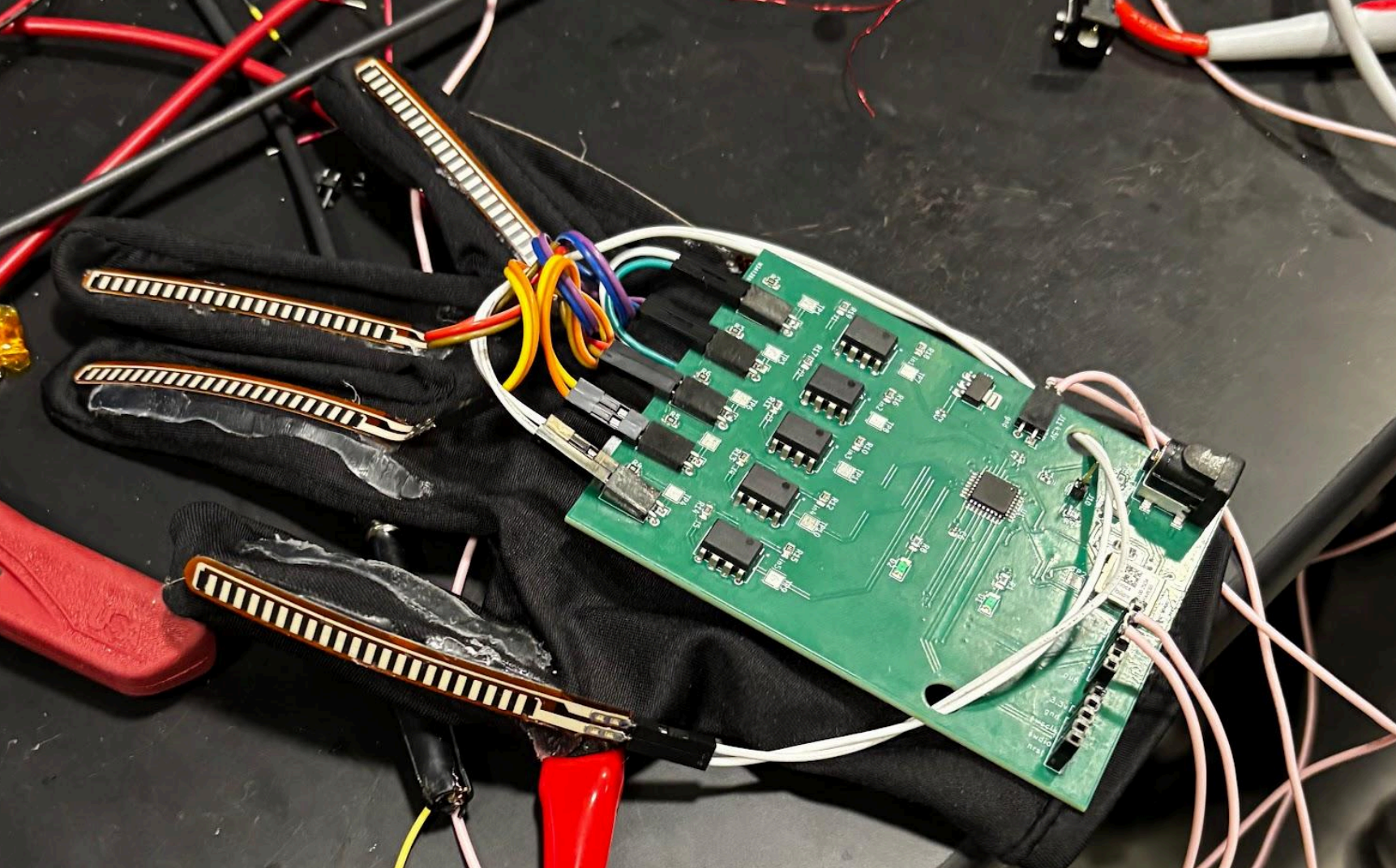
Assembled Remote Controller PCB
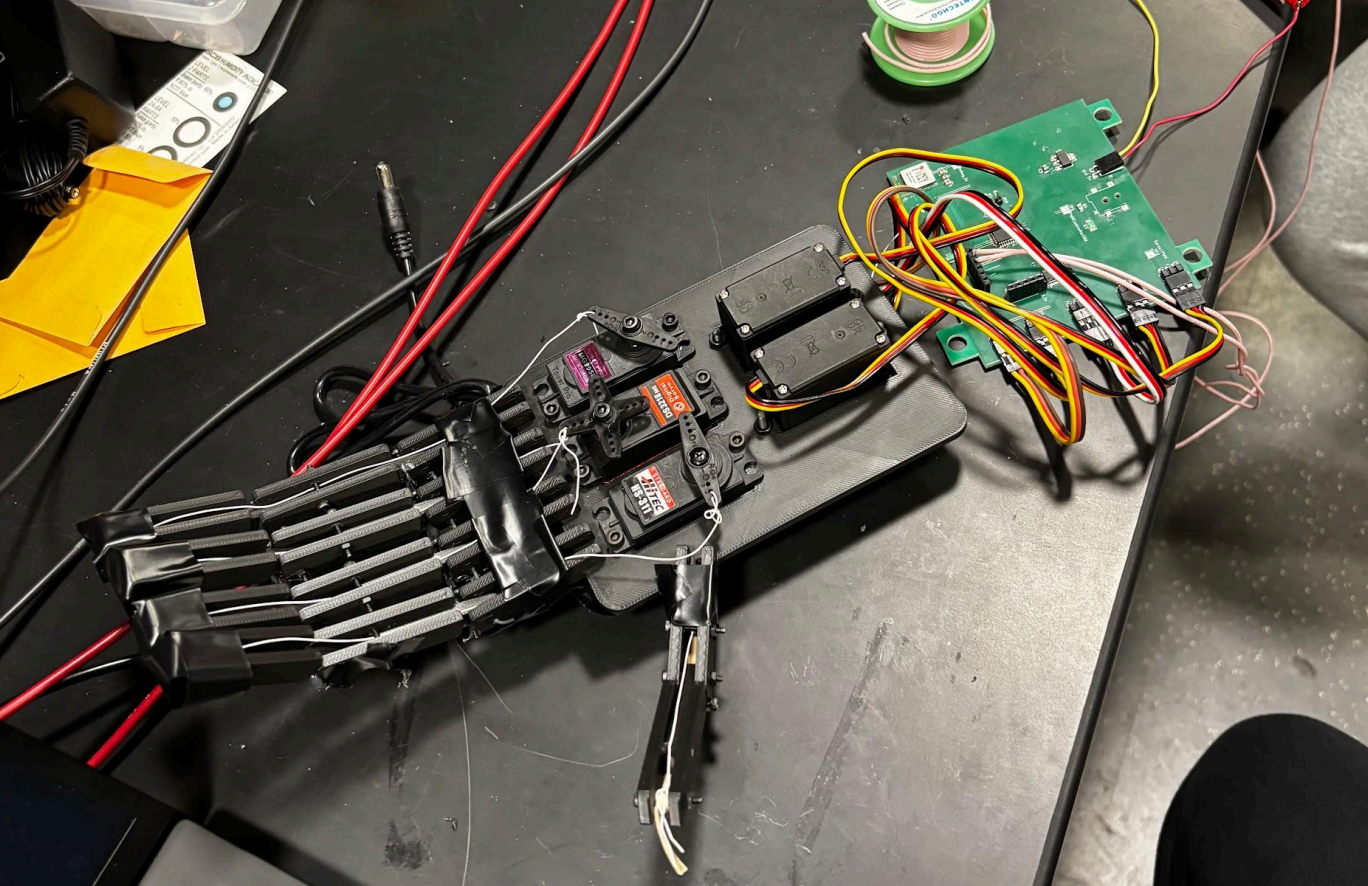
Assembled Servo Controller PCB
Software
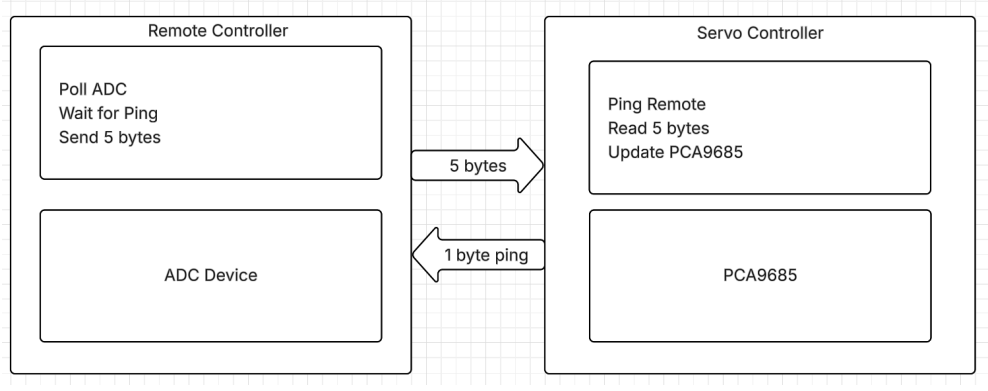
- Remote controller polls flex sensor ADC values and converts them to servo angles.
- Values are sent as UART commands.
- Servo board updates PWM outputs through PCA9685.
Software Control Flow
Mechanical
Hand and finger segments were 3D printed from CAD models. Servos pull strings to curl fingers while the flex sensors mounted on the glove capture motion.
Future Work
- Enable NORA-W36 wireless communication.
- Improve mechanical mounting and replace rubber bands with springs.
- Increase MCU clock speed to improve ADC response time.